マリモの光合成による移動を模したローバー(探索機)が開発されました。
その名はMARS(Marimo Actuated Rover Systems: マリモ駆動ローバーシステム)です。
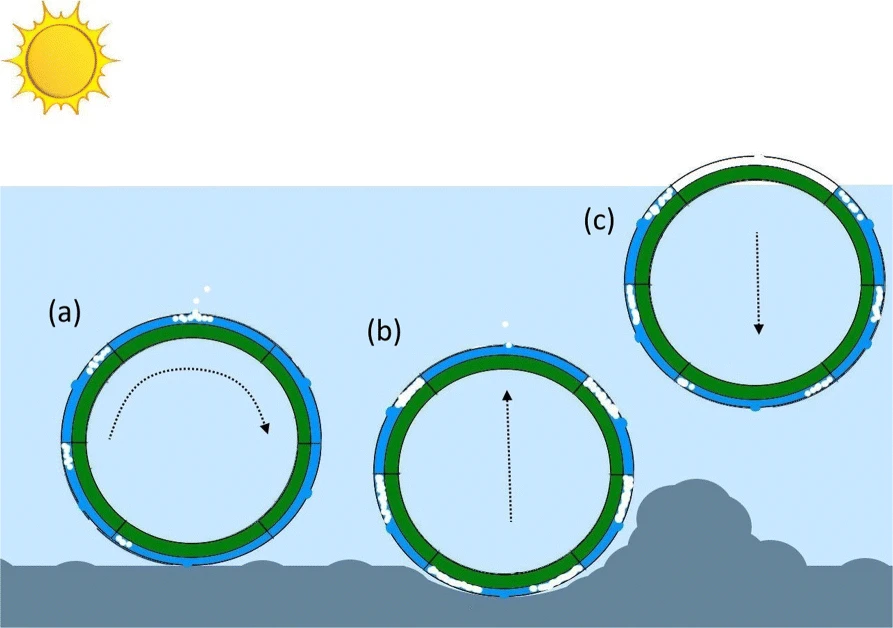
マリモは光合成によって放出する酸素の泡によって水に浮かんだり回転したりします。
その動作を真似て水中の障害物を避けながら移動できるローバーとして作られたのが、このMARSです。
様々な試作品が作られており、見た目は緑色ではありませんが、球状マリモのような球形をしています。
透明の球体の中のパーツは3Dプリンターによって製造された特注品だそうです。
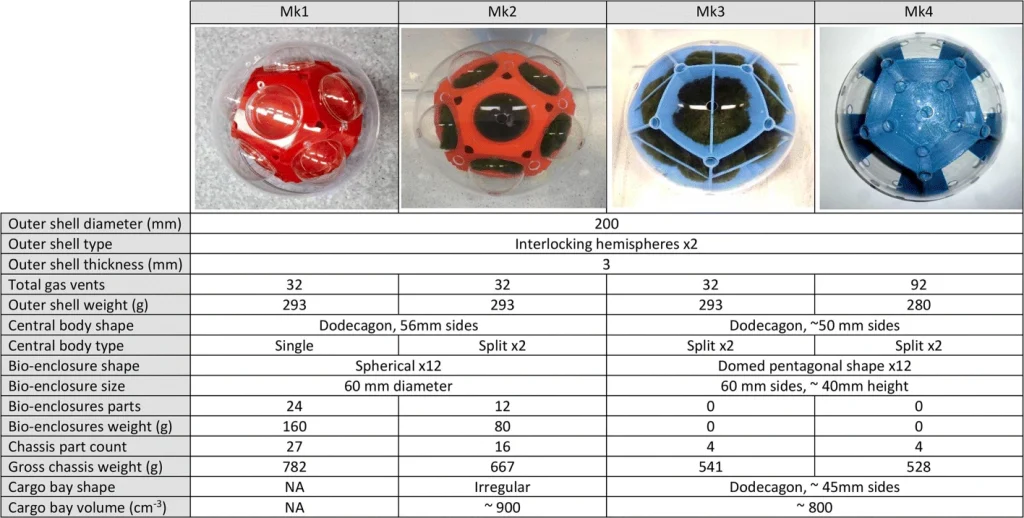
大きさはすべて直径20cmです。
内部には水と日光によってガスを放出する物質が注入されています。表面にはガスが適度に外部に漏れて移動するように穴が開けられています。
このマリモ型探索機の特徴としては、動力源に電力も磁力も必要としないため、収集した情報にそれらによるノイズが乗る心配がないという点が挙げられます。また、モーターによる移動でもないため、水中の生物を刺激しないことも利点です。
将来的には、水面下の爆発物の探索およびその除去に活用されることが想定されているそうです。
まだ試作段階ということですが、実際に障害物を避けて進む実験には成功しているそうです。これからの発展に期待したいです。
参考
Marimo actuated rover systems | Journal of Biological Engineering | Full Text



※ コメントの反映には時間がかかる場合があります。